






NX CAM Robotics – robot programming
NX is a modern CAD/CAM/CAE system offering consistent integrated applications that allow you to support all work related to product development, from stylistic assumptions, design through digital analysis and verification as well as manufacturing modules. It has specialized NX CAM applications for programming CNC machine tools, milling machines, lathes, wire cutters, milling robots and CMM measuring machines.
An industrial robot as a CNC milling machine is not a new, although still innovative solution. The comparison of industrial robots with the capabilities of 5-axis CNC milling centers in terms of kinematics of working movements is an alternative to the latter. It is possible to process objects with large dimensions and very complex shapes. The robot has more freedom, which allows it to achieve a given position of the programmable point within the multivariate configurations of its arms.
This allows the undercut to be made more easily (e.g. negative angles, holes with a negative Z axis). The dimensions of the workpiece in the case of machining with the use of an industrial robot are not such a key factor as the possibility of processing hard-to-reach places in one fixation and clamping of the workpiece, although they are also an advantage. In terms of their kinematic capabilities, industrial robots are very flexible compared to CNC machine tools.
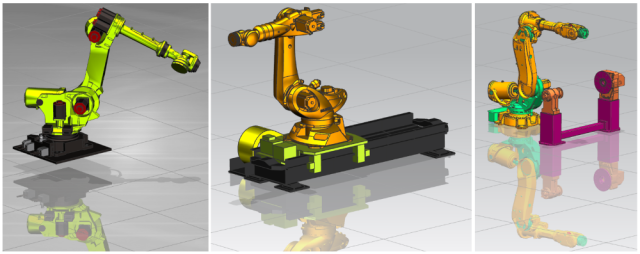
Examples of kinematic solutions of milling robots
In terms of application, an equally interesting aspect is the cost side. The implementation of an industrial milling robot as well as operating costs are lower than in the case of a CNC machine tool, which is an economic justification. A robotic machining station requires a smaller installation area than standard CNC vertical milling machining centers.
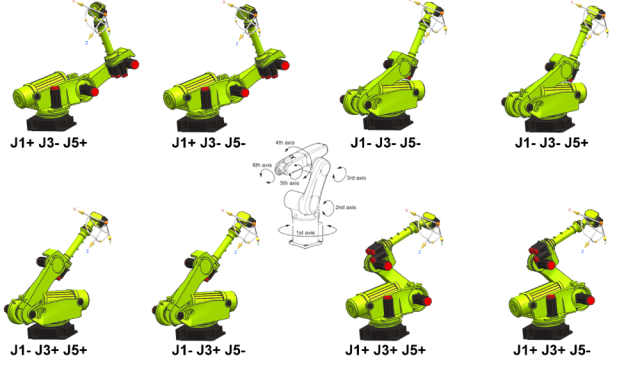
Configuration possibilities of the robot’s kinematic nodes – here FANUC
In the case of CNC machine tools, the course of the tool path and machining parameters requires the generation of a machining program, the so-called G codes using programs or CAM systems (eg NX CAM). The NC program defines all controlled axes, including the movements of the tool, slides in the working space of the machine tool. This requires the use of the so-called a postprocessor that finally synthesizes the machining program for a specific machine tool (kinematics) and the CNC control system.
In the case of industrial robots, this is a much more complicated issue due to the variety of structures, including configurations, and a different number of controlled axes, which also translates into the complexity of adjusting control systems for the needs of CNC milling with the use of robots. In addition to the movements of the industrial robot itself, all external axes (including transport subsystems) must be programmed.
Until now, a serious limitation of the applicability of an industrial milling robot was and still is the stiffness of such a system and the use of low-power spindles. As a result, this machining method is primarily used for machining workpieces made of easily machinable materials that do not require high accuracy. Examples of such materials are: foams, plastics, polystyrene or wood.
The processing of harder or hard materials is a challenge and the desired efficiency in this area cannot be said. Unlocking the possibility of processing metal objects will be a breakthrough in the scope presented here. Solutions enabling this are the subject of works of many centers. A compromise solution is one in which the industrial robot is responsible for the movement of the object in relation to the stationary spindle.
However, this approach only partially eliminates the lack of sufficient rigidity of the system with an industrial robot. While the milling of metal objects, including steel in the area of roughing and partially shaping, is a challenge and it is difficult to indicate the effectiveness of such machining, it is possible to carry out finishing machining.
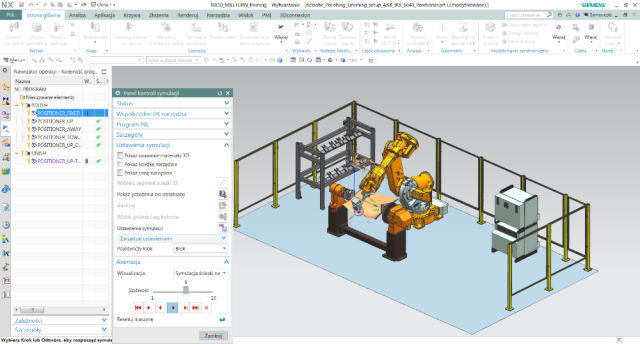
ABB robot simulation – blade machining in NX CAM Robotics
Examples of such treatments include:
• smooth grinding of objects with curved and / or free surfaces (e.g. water fittings), also made of difficult-to-machine materials (e.g. aircraft alloys),
• polishing (including water taps).
An example of shaping machining are technological tasks that can be implemented by machining with the use of an industrial robot, such as:
• cutting edges,
• cutting injection fittings,
• removing flashes, blunting sharp edges,
• engraving,
• plasma or water jet cutting.
CAD/CAM software plays a key role in the implementation of machining with industrial robots. The ability of the program or CAM system to generate the tool path with the use of a robot is the real possibility of complicated, in terms of surface shape, machining. The variety of designs and configurations of industrial robots, additional control axes (including transport and storage subsystems) place high demands on both CAM software and CNC control systems.
In the case of an industrial robot, machining programs are more complex than those generated for CNC machine tools. Some sources also mention a variety of forms and formats for CAD input data, but this is an area of concern that covers all issues in the CAD-CAM data flow. Regardless of the form of the input data, they must be developed in CAD software to be able to use them in CAM. The data transfer issue can be a source of errors.
The main reason, however, is the low stiffness of the industrial robot in relation to stationary CNC machine tools, which forces the need to control the tool load (radial and axial), as well as the working feed. The aim is to ensure a smooth working transition of the tool without abrupt changes in its path, with as constant a load as possible. Such solutions are used in the development of machining programs for the needs of HSC (High Speed Cutting) and HPM (High Performance Machining).
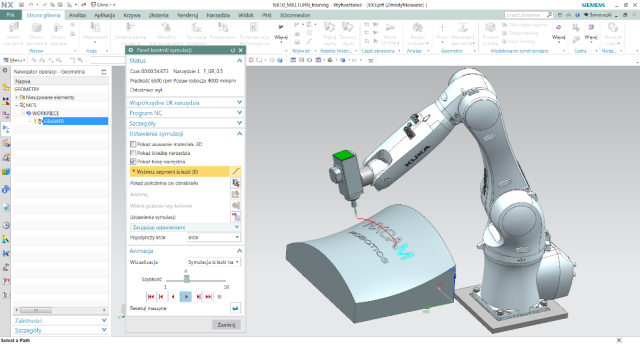
Simulation of a KUKA robot – engraving in NX CAM Robotics
Examples include NX CAM, VoluMill and NX CAM Robotics. Effective integration of the capabilities of various IT solutions allows for a full simulation of spatial processing (3D) with simultaneous collision analysis, verification of defined boundary conditions, accelerations, and reference to selected parts of the industrial robot.
NX CAM Robotics software is compatible with, among others with well-known industrial robots that are used today for milling: e.g. ABB, KUKA, FANUC based on ABB RAPID controls (S4, S4C, S4C +, IrC5), KUKA KRL (KRC 1/2/3/4), FANUC TPE (RJ2, RJ3, R30iA, R30iB), SINUMERIK 840D.
The advantage of the NX CAM Robotics environment is the simplicity of programming robots using the same operations known from the milling package and working in the integrated NX CAD/CAM environment. After the path has been programmed, we can carry out an accurate simulation and verification of the element processing and the work of the 3D robot model (similar to milling machines).
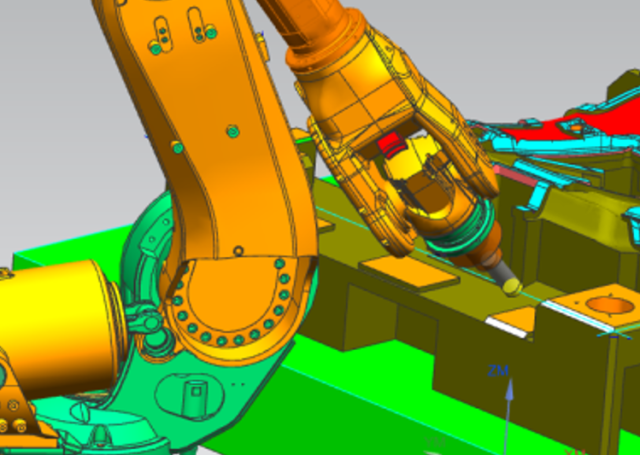
Simulation of phase machining in NX CAM Robotics
NX CAM Robotics Machining for off-line programming of robots was developed by integrating Tecnomatix® into advanced robotic solutions with NX CAM software. This software allows you to design, simulate, validate and optimize the machining program of your own industrial robots for machining tasks.
The implementation of industrial robots carrying out subtractive machining is justified by the progress in the field of industrial robot control, including the achieved positioning accuracy and repeatability. The issue of qualified staff of middle-level employees is not without influence here. Despite the many advantages, robotic processing stations, due to the low rigidity of the structure, are not able to replace classic (standard) CNC milling centers. On the other hand, they constitute an extension of technological possibilities, complement production capacities, which, given the modern nature of production, plays an important role in maintaining competitiveness on the market.
The use of the integrated NX CAM environment for programming milling robots affects the efficiency of machining time, increases the efficiency and effectiveness of production.





